Hoofdstuk 4.2
Robotic picking
In dit hoofdstuk vindt u informatie over veelvoorkomende risico's in robotpickingomgevingen en hoe u deze kunt verminderen met behulp van beschermende maatregelen zoals hekwerken, lichtschermen en werkruimteafscheiding. In dit hoofdstuk wordt ook uitgelegd dat robots die bedoeld zijn voor collaboratief gebruik extra veiligheidsmaatregelen nodig hebben, vooral wanneer gereedschappen of machine-interfaces onverwachte gevaren kunnen opleveren.
Soorten robots die worden gebruikt bij het picken
Robots worden steeds vaker ingezet om goederen en pakketten te picken en te plaatsen om bestellingen te voltooien. De gebruikte robots kunnen zijn:
- Industriële robots die zich met hoge snelheid voortbewegen en doorgaans middelzware tot zware lasten verwerken.
- Collaboratieve robots (“cobots”) zijn zo ontworpen dat ze zich voortbewegen met snelheden en krachten die bij contact/botsing geen letsel aan mensen veroorzaken. Over het algemeen verwerken ze lichtere lasten dan industriële robots. De veiligheid van collaboratieve toepassingen moet niettemin zorgvuldig worden bestudeerd, omdat het eindstuk van de robotarm en de werkomgeving gevaren kunnen opleveren.
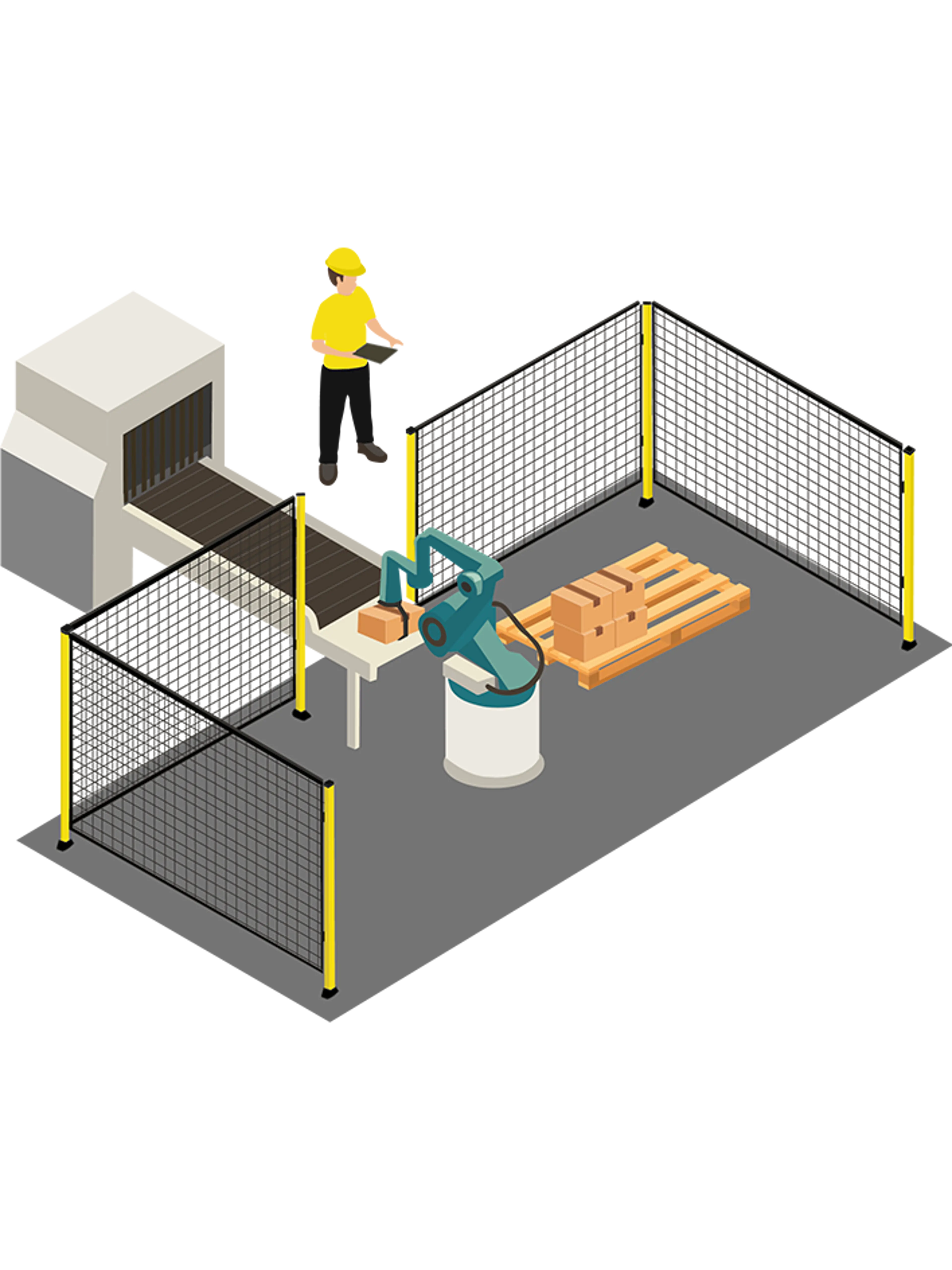
Veiligheidsrisico's in robotpickingzones
Hoewel robotpicksystemen snelheid en precisie bieden, brengen ze ook veiligheidsuitdagingen met zich mee, vooral wanneer mensen en machines dicht bij elkaar werken.
Het type robot, de indeling van de omgeving en de gebruikte gereedschappen zijn allemaal van invloed op het risiconiveau. Hieronder staan enkele van de meest voorkomende gevaren waar u op moet letten.
- Net als bij elke andere robottoepassing brengen industriële robots een hoog risico met zich mee op botsingen, beknelling, afschuiving en het vallen van geladen voorwerpen. In brownfield-installaties kunnen deze risico's worden verergerd door ruimtegebrek.
- Robots die bedoeld zijn voor collaboratieve toepassingen worden als “veilig” beschouwd, maar het eindstuk van de arm en de koppeling met transportsystemen en andere machines kunnen enig risico met zich meebrengen.
Veiligheidsstrategieën per robottype
Om risico's in robotica-omgevingen te verminderen, moeten veiligheidsmaatregelen worden afgestemd op het type robot dat wordt gebruikt.
Terwijl industriële robots vaak volledige beveiliging vereisen, kan het bij collaboratieve robots ook nodig zijn om de toegang te beperken, afhankelijk van de gereedschappen en de omgeving. De onderstaande strategieën helpen om een veilige en efficiënte werking te garanderen.
Beperk het bewegingsbereik van industriële robots op een veilige manier en installeer beveiligingen.
Gebruik:
- Veiligheidshekken, lichtschermen, laserscanners of contactmatte (Pas EN ISO 10218-1/-2 of ANSI/RIA R15.06 in de VS toe).
Beperk de toegankelijkheid van collaboratieve werkruimtes door middel van fysieke barrières aan de zijkanten die niet toegankelijk hoeven te zijn voor operators.
Gebruik:
- Veiligheidshekken als er aanzienlijke risico's zijn aan het uiteinde van het armgereedschap.
- Voetgangersbarrières of lagere ‘bewustzijnsbarrières’ om mensen te waarschuwen voor gebieden waar ze niet mogen komen; dit helpt ook om de robot zo min mogelijk te ‘storen’, waardoor de toepassing efficiënt blijft.
