Subhoofdstuk 4.1
Mobile autonomous machinery
In dit hoofdstuk worden de veiligheidsaspecten van industriële mobiele robots (IMR's), zoals AGV's en AMR's, behandeld. U leert hoe deze systemen werken, waar risico's ontstaan en welke ingebouwde en aanvullende beschermingsmaatregelen worden aanbevolen om een veilige interactie tussen mensen en mobiele automatiseringssystemen te garanderen.
Flexibel transport met AGV's en AMR's
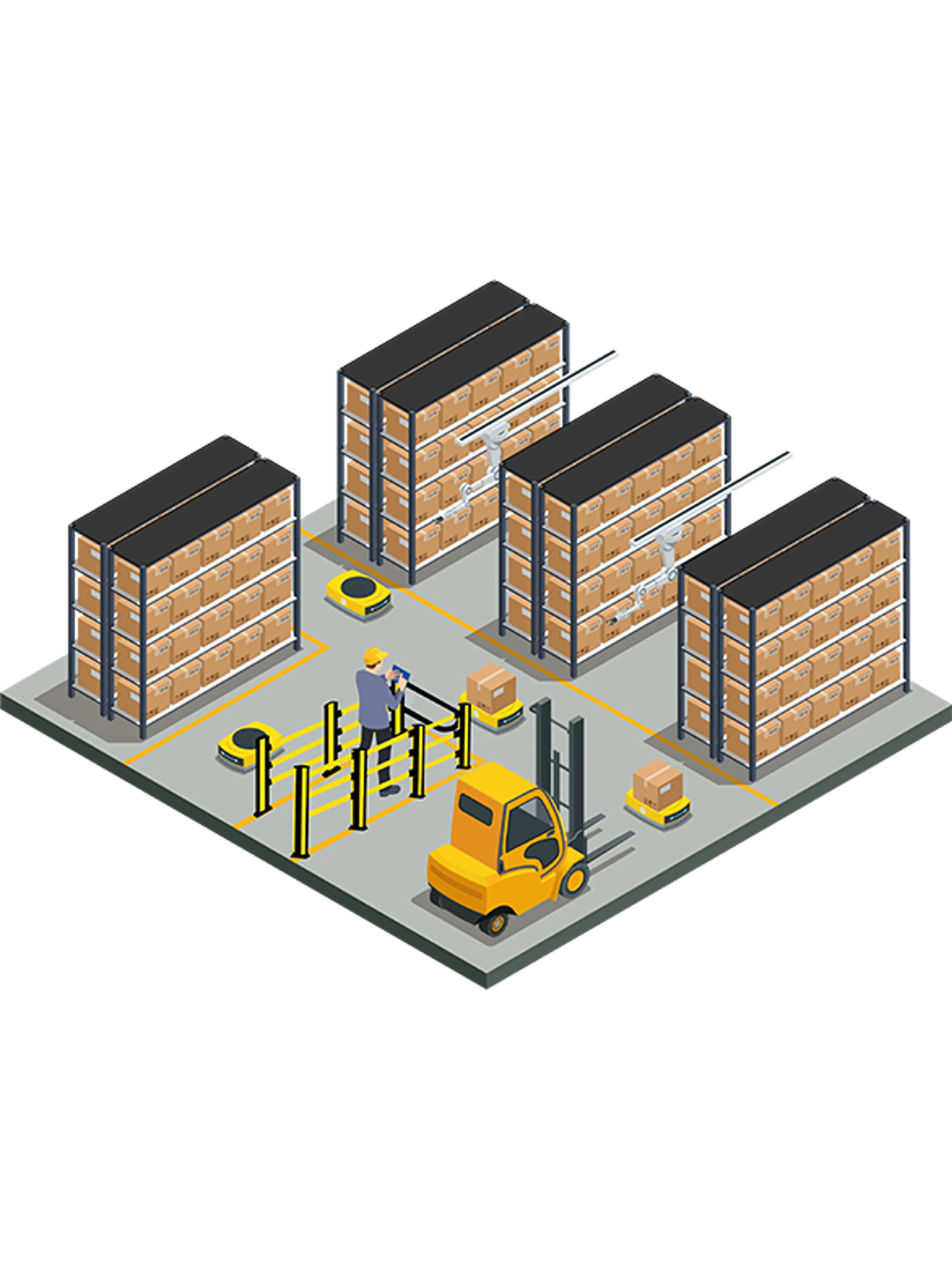
Industriële mobiele robots (IMR), zoals automatisch geleide voertuigen (AGV) en autonome mobiele robots (AMR), kunnen diverse opslagunits van en naar opslaglocaties vervoeren.
Ze kunnen pallets, complete rekken of zelfs zeer grote eenheidsladingen tillen, dragen en verplaatsen, maar worden vaker gebruikt voor dozen, bakken en tassen. Ze worden voornamelijk ingezet in ‘goods-to-person’-strategieën voor het picken van dozen en stuks, maar kunnen ook worden gebruikt voor tussentijdse transporttaken in een ‘person-to-goods’-schema.

Typische methoden voor het hanteren van ladingen door IMR's
Er zijn vijf belangrijke manieren waarop IMR's ladingen oppakken en neerzetten (combinaties hiervan kunnen ook worden gebruikt):
- AGV's die dienen als onbemande vorkheftrucks die pallets verplaatsen.
- Een robot, lineair transportsysteem of transportband plaatst de lading bovenop het voertuig (dergelijke voertuigen worden vaak ‘onderwagens’ genoemd; ze kunnen een zeer lage hoogte hebben van slechts 50 tot 300 mm).
- De IMR heeft een transportband bovenop voor het overnemen; sommige IMR's kunnen de transportband in een rek uitschuiven om deze op te halen, en er kunnen grijpers worden voorzien om te helpen bij het oppakken/vastzetten.
- De IMR beweegt onder een lading, tilt deze op en verplaatst deze; hele rekken kunnen zo worden opgetild en overgebracht naar een orderverzamelwerkplek en terug naar het magazijn (dergelijke systemen worden vaak ASRS = Automated Storage and Retrieval Systems genoemd).
- Een robot bovenop een IMR pakt artikelen, plaatst ze in een doos of op een platform, transporteert ze en plaatst ze vervolgens op een doel locatie; dergelijke IMR's kunnen ook productiefuncties vervullen, zoals reinigen, polijsten, inspecteren enz.
Common hazards in IMR environments
While IMRs are equipped with advanced safety features, certain risks remain, especially when people become inattentive or accustomed to their presence.
In emergencies, mobile robots may also obstruct escape routes. The following list outlines key hazards that should be carefully considered when planning and implementing IMR systems:
- Collision risk - impact or running over of people, especially where IMRs and pedestrians share space or when vehicles access manual workstations.
- Underride hazard - low-height IMRs may pass under equipment or fencing if floor gaps are too large.
- Crushing/shearing with surroundings - in tight areas like racking, narrow aisles, doorways, machinery, or structural parts.
- Load handling risks - crushing and shearing during docking, charging, or load transfer.
- Toppling loads - risk of impact from unstable or falling items.
- Localization errors - accidents due to failure or mis-localization, especially near stairs, ramps, loading docks, blind corners, etc.
- Deactivated sensors - presence-sensing may be suspended during docking or transfer.
- Undetected people - presence of people in blind spots outside sensor range.
- Add-on equipment risks - hazards from tools like conveyors, grippers, or robotic arms mounted on IMRs.

IMR-veiligheidsvoorzieningen en -normen
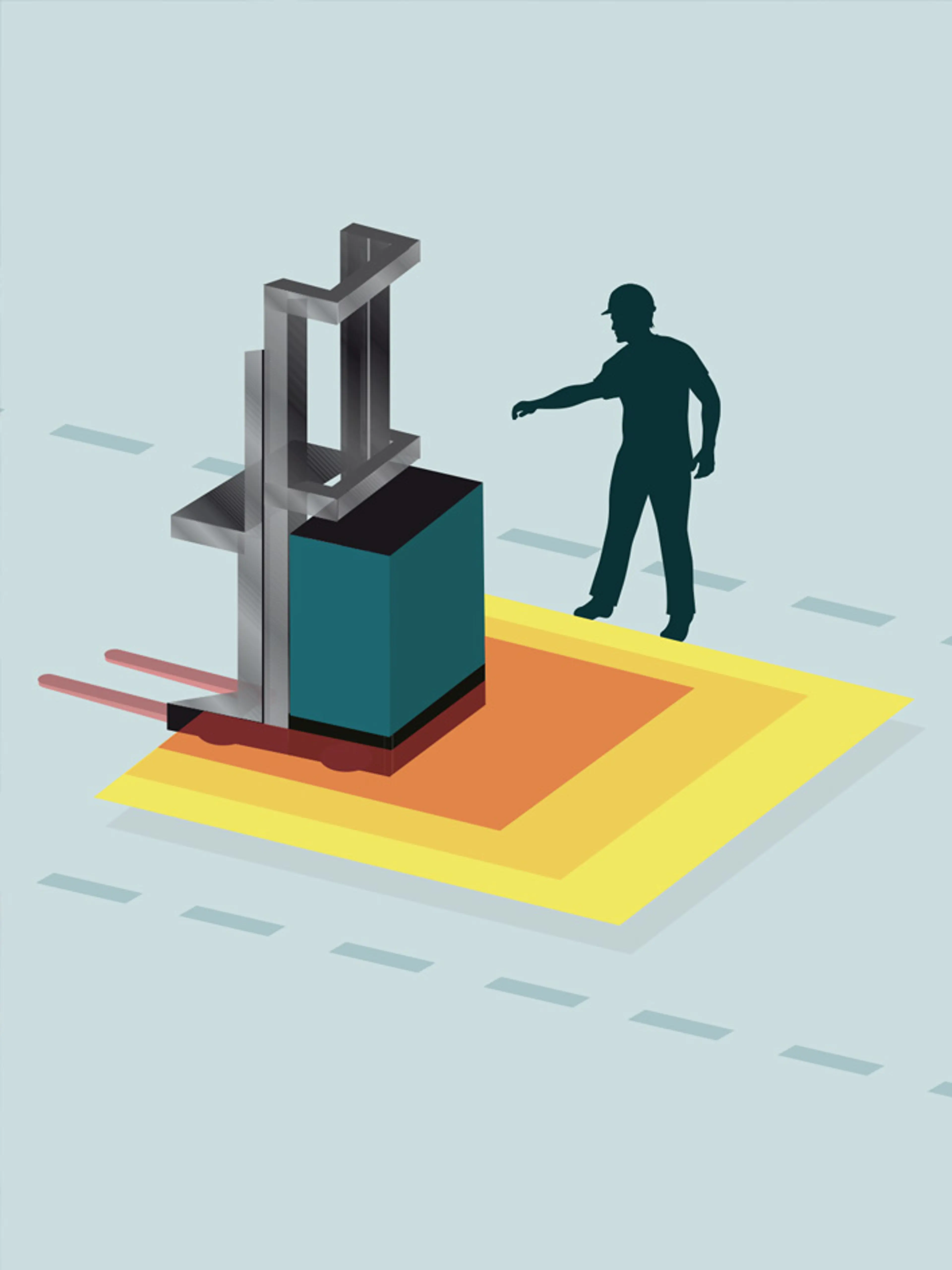
Alle IMR's zijn voorzien van aanwezigheidssensoren die ongelukken voorkomen.
De voertuigen rijden over het algemeen langzaam in gebieden waar mensen rondlopen en stoppen wanneer ze obstakels of mensen op hun pad tegenkomen. De meeste IMR's kunnen worden geprogrammeerd om virtuele verboden en verboden zones te vermijden en sommige zijn bovendien uitgerust met bumpers die bij een impact worden uitgeschakeld.
Passieve veiligheidsvoorzieningen zijn onder meer noodstopknoppen, waarschuwingslichten en alarmsignalen. De veiligheidseisen voor AGV's en IMR's zijn vastgelegd in (EN) ISO 3691-4 en in ANSI/RIA R15.08-1 en ANSI/ITSDF 56-5 voor de VS. Meer informatie over de normen vindt u in hoofdstuk 5.3 Machine veiligheidsnormen.
Op basis hiervan en ondersteund door een grondige risicobeoordeling kunnen de volgende maatregelen nodig zijn om een veilige werkomgeving te garanderen.